Adaptive Euler - resolution of the Grand Challenge of aerodynamics: first principles, automated computation and error control in FEniCS, validation in HLPW, and prototype development toward aeroelasticity and FSI
- Today the industry does not trust aerodynamics simulation - calls it "Colorful Fluid Dynamics"
- Euler aerodynamics makes simulation reliable - direct simulation of natural laws
- You can now reliably design, optimize, certify and innovate aircraft, wind turbines, ships, etc. in the web browser, 100x faster and cheaper than industry standard.
- Strong NASA recognition of breakthrough Euler aerodynamics from NASA Branch Chief of Computational Aerodynamics Cetin Kiris
- Reproducible Open Source Digital Math/FEniCS setting is future-proof - editable, testable, extensible - see e.g. how Linux (with Red Hat as key commercial actor) has become fundamental technology that large part of industry is built on.
- Delivered as DigiMat online course, largest online course in Sweden with 30000+ participants.
Johan Jansson (jjan@kth.se), key collaboration with Kristoffer Wingstedt (SAAB)
http://icarusmath.com
http://digitalmath.org (research environment)
*Leonhard Euler [1707-1783] one of the greatest mathematicians in history.
References - NASA (Branch Chief Cetin Kiris) recognition of Euler \
[W-030 = Johan Jansson's Icarus/KTH team]
"As good as it gets" statement from NASA
https://hiliftpw.larc.nasa.gov/Workshop4/presentations.html
Success Stories
- Elected to IVA Royal Swedish Academy of Engineering Sciences 100-list
- Highlighted by NASA/HiLiftPW and Fields Medalist
- Pilot project with leading Formula 1 team, leading aircraft companies
- Johan Jansson and Icarus team co-founded FEniCS Open Source project - today de-facto world-standard for advanced math modeling - key component of Digital Math. Kristoffer key FEniCS developer at early stage, robust collaboration platform during 20 years.
- Invited to World Expo with Vinnova and RISE - highlighted by Ambassador
- Highlighted by IVA and President of Association for Swedish Engineers as "possible solution to the crisis in Matte/STEM", and Teacher Magazine reaching all teachers in Sweden - close collaboration with Lidingö Municipality
- DigiMat Pro Sweden's largest online course 30000+ participants
- ELISE project for electric aviation - predictive design with Heart+Katla leading electric regional aircraft and drone startups in Sweden
- Johan Jansson's role in ELISE to "develop next-gen aerodynamics software that will be used for the aerodynamic design of the aircraft." based on Euler breaktrhough.
-
Excellent feedback from course participants:
Basic: "Super-fun way to learn math!", "I did not know so much about algoriths before, but now I've started to understand".
Pro: "Cool!", "Very exciting!", "It is good that the Digital Math computational environment and the theory are combined together.", “Hands-on experience of manipulating codes that are applied in the real world engineering problem.”, 90% recommends course to others.
NASA Vision 2030
Slotnick, J. P., Khodadoust, A., Alonso, J., Darmofal, D., Gropp, W., Lurie, E., & Mavriplis, D. J. (2014). CFD vision 2030 study: a path to revolutionary computational aerosciences (No. NF1676L-18332).
The use of CFD in the aerospace design process is severely limited by the inability to accurately and reliably predict turbulent flows with significant regions of separation.
See also Certification by Analysis 2040 - we already now, 10-20 years ahead of time cover key aspects.
Methodology
- Proposed Adaptive Euler as solution to the NASA Vision 2030 challenges.
- Predictive incompressible Euler - first principles - no modeling parameters - free slip BC.
- Direct FEM cG(1)cG(1) in FEniCS with adjoint-based adaptive error control.
- Extremely fast and cheap: < 100 core hours - "zero" computational cost. 300x cheaper than industry standard "fastest" simulation technology RANS, 1000x-10000x cheaper than WMLES ("scale-resolving" technology)
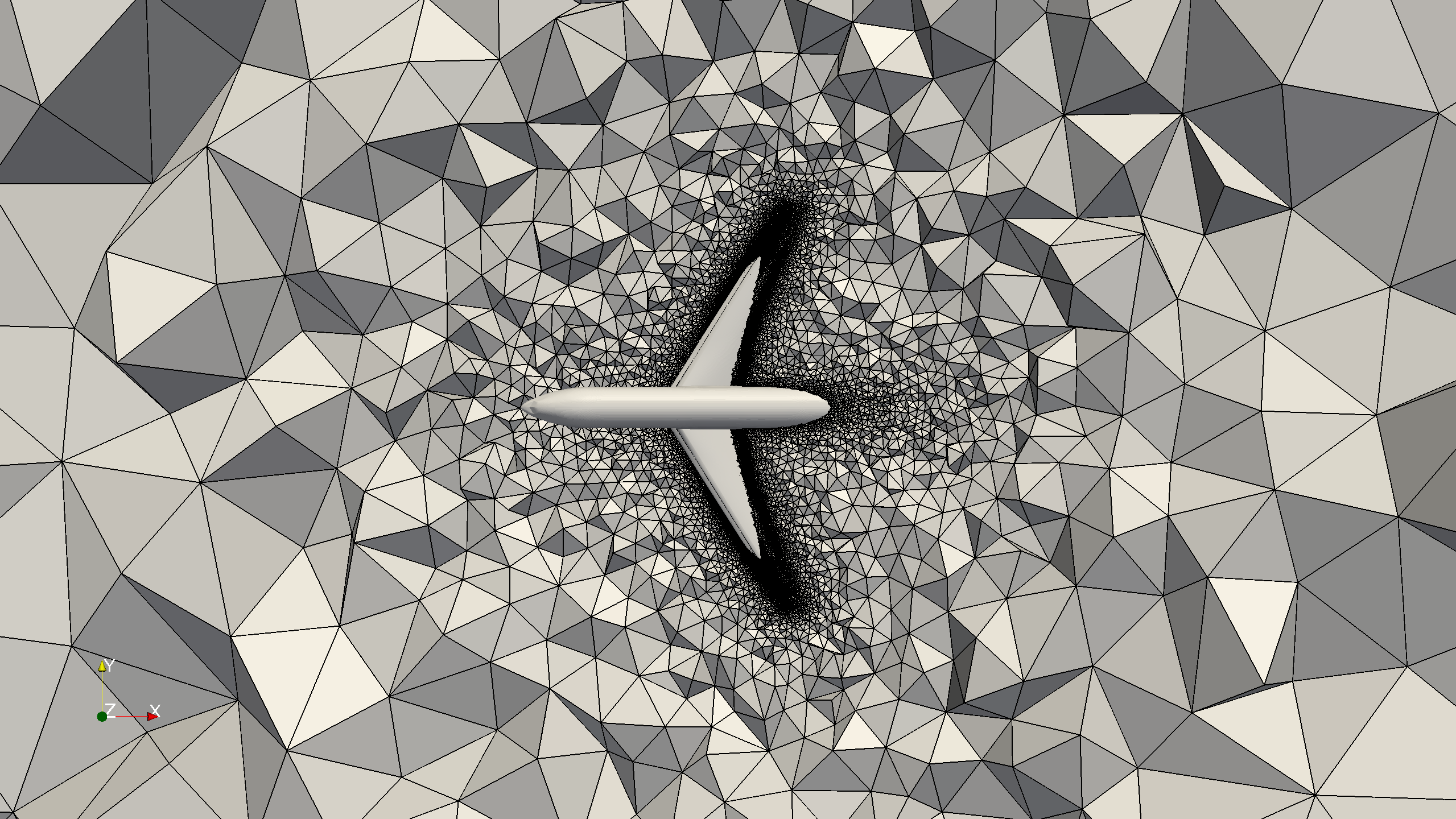
- Coarse starting meshes for adaptive methodology from ANSA: 100k vertices giving good validation.
- Vision: Design and certification of aircraft and engineering systems should be done by simulation (e.g. Digital Math Real Flight Simulator) within 5 years.
Section: FEniCS
Automated Digital Math- realized in FEniCS
- Automated discretization: (generate code for linear system from PDE/model.)
r = (inner(grad(u), grad(v)) - inner(f, v))*dx $\Rightarrow $ Poisson.cpp
- Automated error control: (including parallel adaptive mesh refinement.)
Direct duality-based error control: $ M(\hat{e}) = r(\hat{U}, \hat{\phi})$
$|M(e)| \le TOL \Rightarrow$
with $M(e)$ a goal functional of the computational error $e = u - U$, and $\hat{\phi}$ the adjoint. - Automated modeling of unresolved subscales: (i.e. turbulence)
$(R(U), v) + h(R(U), R(v)) = 0, \forall v \in V_h$ (residual-based stabilization/dissipation)
Goal: Automatically generate the program, mesh and solution from PDE/model (residual) and goal functional $M(U)$ (e.g. drag).
First principles - Euler equations for fluid - slip boundary condition
Automated symbolic differentiation in FEniCS - Automated linearization as part of GLS stabilization
# Automated linearization using derivative
r_SD0 = derivative(d*inner(grad(u1)*u1, grad(u2)*u2)*dx, u1, u)
r_SD1 = derivative(r_SD0, u2, v)
r_SD1 = replace(r_SD1, { u1: u, u2: u })
# Manual linearization
r_SDA = r_SD1
r_SDM = d*inner(grad(u)*u, grad(v)*u)*dx
Same values to machine precision.
Adaptive Euler Compressible AePW-4 Test Case 1 OAT15a very preliminary Automated adjoint/dual generation in FEniCS
# Formulate and compute dual/adjoint based on primal/forward wprimal
r_G_primal0 = inner(R(u, rho, p)[0], v)*dx + \
inner(R(u, rho, p)[1], nu)*dx + \
inner(R(u, rho, p)[2], q)*dx
r_G_dual0 = adjoint(derivative(r_G_primal, wprimal, w), (wtest, wtr))
r_G_dual = replace(r_G_dual0, { wtr: w })
FEniCS component structure
Note that Adaptive Euler depends on DOLFIN, FFC, PETSc (linear algebra), etc. large and global Open Source communities similar to Linux
We have good contact with PETSc (linear algebra) development team (Matt Knepley), and with e.g. recent large community around NURBS/spline FEM (David Kamensky).
Section: Adaptive Euler
HiLiftPW4 Prediction of CL and CD pre-stall within 5%, and CM for all angles and CL and CD at stall within 10%, spefically also predicts pitch-break.
Mesh-independent under adjoint-based adaptive error control
HiLiftPW4 CP plot for 21.5deg
Consistent with 5% accuracy vs. exp in forces, which are simply integrated CP.
Note oscillatory CP in in-board separation wake at A.






Run and modify the simulations yourself in your web browser!
Solving the reproducibility crisis with Digital Math - "The Modern Scientific Paper". More detailed presentation and results:
http://digitalmath.tech/hiliftpw4-aiaa
Adaptive Euler Simple Wing: https://colab.research.google.com/drive/1rTTABf21r8Dd0pJLxNvFfsPSBl6q2H9t?usp=sharing
Adaptive Euler Simple Wing ALE with elastic mesh smoothing: https://colab.research.google.com/drive/1WD8JOQxnvcCixCrf2YXAm13pariYf1ti?usp=sharing
Adaptive Euler HLPW5 Case 2.2, 2.3, 2.4 preliminary forces
Our Adaptive Euler team achieved the target of prediction of key CLmax quantity within 2% of experiment in a blind setting (we did not have access to experimental data. Only 3 teams in WMLES group achiieved this: Adaptive Euler, Volcano (previous NASA branch chief) and PowerFlow. We also captured the key separation and stall phenomenon. Our performance is 300x cheaper than RANS and 1000x cheaper than WMLES.
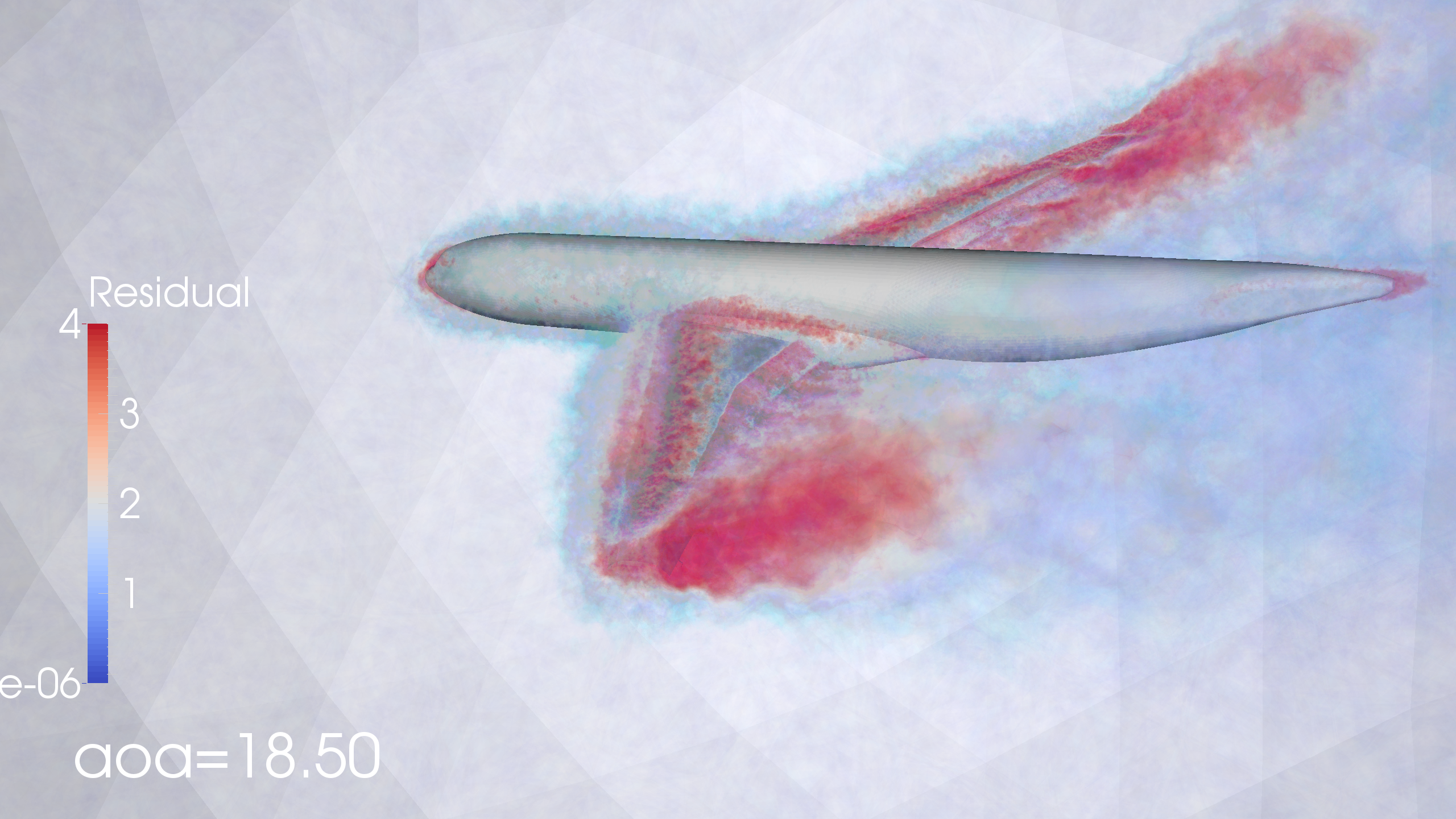
Adaptive Euler HLPW5 Case 2.4 preliminary adaptive forces aoa=19.7
Variance CL and CD: ~3% 180k-230k vertices (appx. 5% increase of num. vertices each adaptive iter.)
Activity: Verification and uncertainty estimation.
Hypothesis: Mesh-cónverged forces already on coarsest starting mesh for all angles (iter_00).
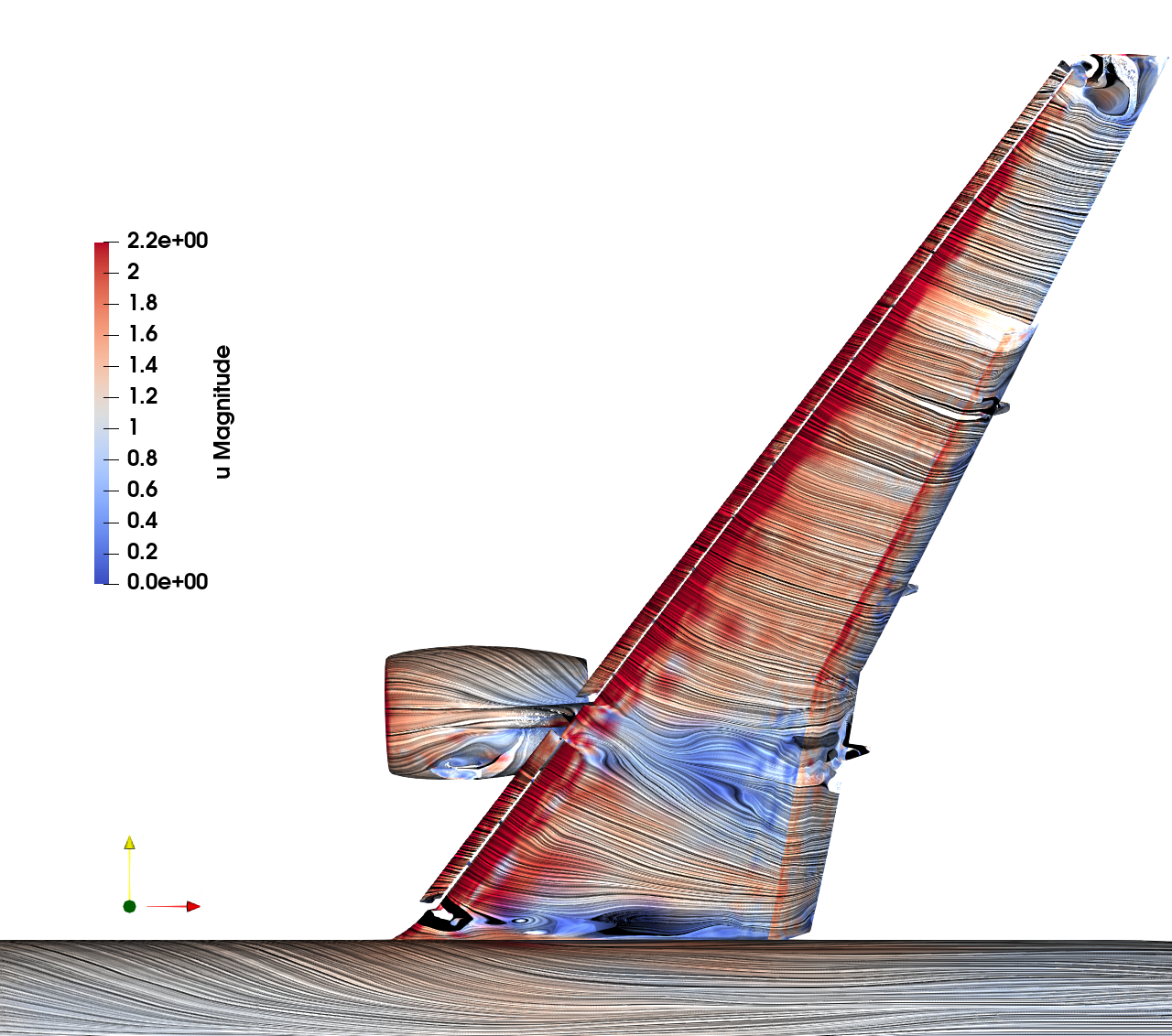
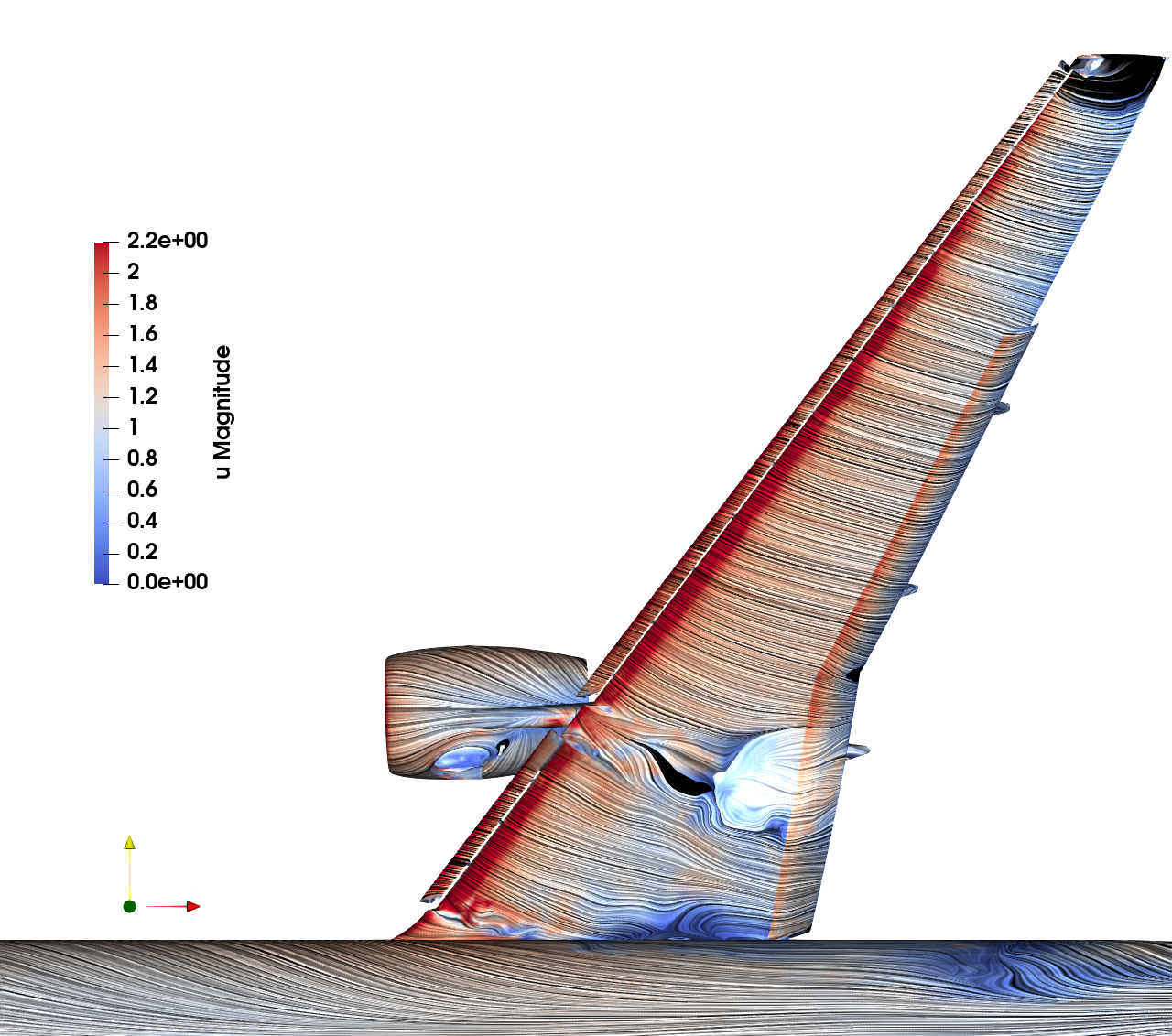
Validation against oil flow for separation mechanism at stall angle (HLPW3)
The separation mechanism and validation looks similar for HLPW4 and 5
Our Adaptive Euler team achieved the target of prediction of key CLmax quantity within 2% of experiment in a blind setting (we did not have access to experimental data. Only 3 teams in WMLES group achiieved this: Adaptive Euler, Volcano (previous NASA branch chief) and PowerFlow. We also captured the key separation and stall phenomenon. Our performance is 300x cheaper than RANS and 1000x cheaper than WMLES.
Adaptive Euler HLPW5 forces blind validation and comparison to other participants
We observe a significant interaction of the wake with the tail at aoa=23.6 . We also observe a significant difference of appx. 15% in CM between "full span" and "half span", which we interpret as a "blockage effect".
This appears to be in principle a "buffeting" phenomenon.
We observe a significant interaction of the wake with the tail at aoa=23.6 . We also observe a significant difference of appx. 15% in CM between "full span" and "half span", which we interpret as a "blockage effect".
This appears to be in principle a "buffeting" phenomenon.
Cylinder Re=Infinite starting from u=0
Resolution of D'Alembert's paradox: with unsteady Euler potential solution first establishes, but is unstable and develops into streamwise vortex solution, with non-zero drag close to experiment (see slides before)
Cylinder Re sweep from Re=4e3 to Re=Infinite (e.g. 1e7+)
Cylinder Re sweep from Re=4e3 to Re=Infinite (e.g. 1e7+)
Section: Aeroelasticity
Movie of velocity and motion Adaptive Euler PAPA prototype
Movie of elastic smoother mesh motion Adaptive Euler ALE
def epsilon(v):
return 0.5*(grad(v) + grad(v).T)
rsmoother = inner(1.0/h*epsilon(wmeshvel), epsilon(vv))*dx + \
gamma*nm*dot(wmeshvel - wmeshvelf, vv)*ds + gamma*im*dot(wmeshvel, vv)*dx
newtonIteration(rsmoother, wmeshvel)
Try and edit yourself! Adaptive Euler Simple Wing ALE with elastic mesh smoothing: https://colab.research.google.com/drive/1WD8JOQxnvcCixCrf2YXAm13pariYf1ti?usp=sharing
Daumas, L., Chalot, F., Forestier, N., & Johan, Z. (2009). Industrial use of linearized CFD tools for aeroelastic problems. IFASD, 54, 21-25.
“The Galerkin/least-squares (GLS) formulation introduced by Hughes and Johnson, is a full space-time finite element technique …”
Preliminary Adaptive Euler Compressible - qualitative validation against Adaptive Euler Incompressible HLPW5 aoa=19.7
Unified Continuum Fluid-Structure Interaction of flapping in FEniCS, simplified setting for conceptual purpose
Section: Possible collaboration
General planning/proposals
With the Adaptive Euler/FEniCS Open Source technology we reliably predict your aerodynamic design based on first principles. You can trust the results, and use them for decisions, optimization, redesign, etc.
General FEniCS framework for reliably and automatically predicting/simulating any mathematical model: fluid mechanics, solid mechanics, electromagnetics, chemistry, multi-physics, etc.
Easy and straightforward to yourself modify, inspect, extend. For example, you can very easily modify the Adaptive Euler FEniCS formulation into a standard WMLES formulation with explicity friction and turbulence modeling and also run that.
Good validation at the highest level and at the same time 300x-1000x faster and cheaper than the best CFD in the world: RANS and WMLES in NASA/AIAA High Lift Prediction Workshop, "zero" computational cost.
Plug-in component in your CAE/aero workflow, can reuse CAD, mesh generation, visualization.
We can provide reliable first-principles aero-data for any aircraft, e.g. certification of full aircraft, drones, new aircraft concepts, etc.
"Transient adjoint" indicates where design should be modified for maximum gain.
Contact: Johan Jansson jjan@kth.se
http://digitalmath.tech
http://icarusmath.com
Section: Solving the reproducibility crisis
Problem: Publications are not reproducible
KI President Ottersen describes the problem concisely;
We are in the midst of what some have called a research reproducibility crisis. While scientific discovery and complexity are developing at an unprecedented speed, less than 50% of scientific research studies can be reliably replicated. Left unchecked, this troubling fact may threaten our ability to generate sound, evidence-based knowledge that meets society’s needs. It is time to look beyond the traditional measures of quality and re-examine the very concept of quality itself.
NASA Transform to Open Science (TOPS):
https://science.nasa.gov/open-science/transform-to-open-science
"Lowering barriers to entry for historically excluded communities"
"Increasing opportunities for collaboration while promoting scientific innovation, transparency, and reproducibility.
Illustration: In school one may not only give the answer to a problem - "show your work!".
In research it is often not possible to see or reproduce how the answer was derived or constructed. Why is this so?
Report from European Commission
"Reproducibility of scientific results in the EU", Directorate-General for Research and Innovation (European Commission), 2020
Excerpts from the EU report:
Second, there is a perceived deliberateness, or at least carelessness, in scientific production due to competitive pressures. A growing proportion of scientists are perceived as – willingly or unwittingly – bending some of the basic premises of the scientific method to produce ‘fast science’ or even ‘make believe science’ – facts and theories that are declared true but are dubious or even false. This rests more on the structure of incentives of science-making, embedded in culture and practice, than on deliberate attempts to ‘cheat’. The need for results to be reproducible, and the tangible steps needed to make them so, may help results be trustworthy and keep scientists honest.
Possible remedies:
[...]
Sharing of data, protocols, materials, software, codes, and other tools underlying publications; Transparency of analysis and modelling;
Possible actions:
[...]
17. Fund the testing and R&I development of automatic systems of compliance for reproducibility before publication;
[...]
24. Ensure that Horizon Europe provisions encourage and support
reproducibility (see list of possible actions, above);
25. Employ and police guidelines early in the grant application phase to anchor journal practices;
etc.
Reproducibility in the digital age
Lorena Barba, a professor at George Washington University in Washington, D. C., says in Physics World:
What we are calling for is changing those norms to give importance to the full set of digital objects that are part of a scientific study and acknowledging that the scientific paper is insufficient today in its methods section to include all of the information needed for another researcher to confirm the results or build from those results.
The technology exists to achieve this, there have been technical solutions since the 80s and 90s.
In the US there are now guidelines for requiring the publication of the "digital objects" (Open Source), in the US National Academies of Sciences, Engineering and Medicine. Professor Barba has been a leader in these developments.
Zenodo (https://en.wikipedia.org/wiki/Zenodo) has become a standard resource in science for publishing “data sets”. For each submission, a persistent digital object identifier (DOI) is minted, which makes the stored items easily citeable. Zenodo is based on the Open Source project Invenio.
KTH Library is active in developing an Invenio/Zenodo-framework for supporting reproducibility.
Reproducibility in scientific modeling
With Invenio/Zenodo, DOIs can be acquired for both the source code and generated data for a scientific model, allowing this material to be easily cited. The material may then be shared while avoiding questions about ownership of the intellectual property.
However, just publishing a “data set” or even an archive of the source code, does not guarantee or make scientific results reproducible. It may still take an enormous effort to actually re-run the computations (e.g. lacking familiarity with required software, access to computing resources, etc.), and you do not know before you invest that effort how reproducible the results are (e.g. limited or missing methodology sections).
Reproducibility requires transparency. A lack of transparency in experiments creates a barrier to inclusivity and accessibility in science.
Solution
We present the Digital Math framework as the foundation for modern science based on constructive digital mathematical computation.
Ubiquitous High Performance Computing: "Copy a lab"
- "One click" - Jupyter - Google Colab - MyBinder
- Virtual Machines - Universal computing environment - HPC with 100s-1000s cores.
Easily accessible - “copy our lab at zero cost - rerun experiment in seconds 1-click in web browser”
Advantage of digital and simulation over experiments
Run and modify the simulations yourself i Run and modify the simulations yourself in your web browser!
Solving the reproducibility crisis with Digital Math - "The Modern Scientific Paper". More detailed presentation and results:
http://digitalmath.tech/hiliftpw4-aiaa
Cylinder Re=Infinite starting from u=0
Resolution of D'Alembert's paradox: with unsteady Euler potential solution first establishes, but is unstable and develops into streamwise vortex solution, with non-zero drag close to experiment (see slides before)
Cylinder Re sweep from Re=4e3 to Re=Infinite (e.g. 1e7+)
Cylinder Re sweep from Re=4e3 to Re=Infinite (e.g. 1e7+)
Ubiquitous High Performance Computing (UHPC)
- "One click" - Jupyter - Google Colab - MyBinder
- Virtual Machines - Universal computing environment - HPC with 10s-1000s cores.
- Breakthrough: Most expensive computation (HiLift) now possible in Jupyter/Google Colab with 20 cores and 4-24 hours 100-1000 core hours.
Section: DigiMat solving the Math/STEM education crisis
DigiMat
- New revolutionary way to learn math + coding.
- For all levels.
- Creative and high impact activities developed by leading scientists.
http://digimat.tech Johan Jansson jjan@kth.se
DigiMat Pro
Our automated framework with high-level math notation now de-facto world standard, and is now available in a web-based environment (see above). Predict, visualize, inspect, modify the math source code interactively at the highest echelon in the world, e.g. electric aircraft in the Vinnova ELISE project above.
Learn Digital Math from scratch in our DigiMat program.
Euler overview paper
http://digimat.tech/paper-euler-short/Adaptive Euler as a solution to NASA Vision 2030
1. Emphasis on physics-based, predictive modeling:
Predictive - first-principles, parameter-free, adjoint-based adaptivity
2. Management of errors and uncertainties resulting from all possible sources:
Same as 1, additionally automatically generates low-level source code from math notation
3. A much higher degree of automation in all steps of the analysis process:
Same as 1 and 2
4. Ability to effectively utilize massively parallel, heterogeneous, and fault-tolerant HPC architectures:
Extremely cheap and fast performance (less than 200 core hours),
5. Flexibility to tackle capability- and capacity-computing tasks in both industrial and research environments
Same as 4
6. Seamless integration with multidisciplinary analyses that will be the norm in 2030
Digital Math/FEniCS general framework for PDE (FSI etc.)
Discussion
- Proposed Adaptive Euler as solution to the NASA Vision 2030 challenges.
- Predictive incompressible unsteady Euler - first principles - no modeling parameters.
- Extremely fast and cheap: < 100 core hours - "zero" computational cost
- Coarse mesh from ANSA: 500k vertices giving good validation.
- Vision: Design and certification of aircraft and engineering systems should be done by simulation (e.g. Digital Math Euler Real Flight Simulator) within 5 years.
- Collaboration activity on Euler with ZJ Wang in TFG, replicates fundamental result.
- Slip BC: models the very small skin friction beyond drag crisis at Re ~500000
- Compressible formulation showing similar promising results, on-going validation.
Conclusion
Perspectives
You're welcome to get involved!
Try yourself, modify, extend!
http://digitalmath.tech/hiliftpw4-aiaa
Commercial cooperation:
http://icarusmath.com
Any questions, ideas, comments:
jjan@kth.se
References - IVA highlight of DigiMat \
https://www.linkedin.com/feed/update/urn:li:activity:6925366593916936192/
References - Swedish Engineers highlight of DigiMat \
https://twitter.com/UlrikaLindstr/status/1517133800999858176
Adjoint velocity $\hat{\phi}$ and Residual $R(\hat{U})$ (left column)
Coarse starting mesh and Refined mesh 5 adapt. it. (right column)

NB: Adaptivity targets mean quantity, not pointwise pressure
Adaptiver iter 0 left and iter 3 right.
Adaptive error control for fixed aoa=7
Both CD and CL within 5% of exp, CM within 10%, mesh-independent
Cylinder Re sweep from Re=4e3 to Re=Infinite (e.g. 1e7+)
Formula 1 - Pilot project with leading team
(joint work with Torbjörn Larsson former Ferrari/BMW Head of CFD)
\
CD and CL within 4%
DrivAer standard automotive benchmark with transient adjoint
\
Real Unified Continuum modeling
The methodology is a Direct FEM simulation of the first principle equations, here in multi-phase incompressible form, where we include constitutive laws for a Newtonian fluid and Neo-Hookean solid.
These first principle equations are discretized by the Direct FEM approach, meaning Galerkin-Least-Squares (GLS) stabilization with shock-capturing.
The Galerkin part of the method is formulated as below in FEniCS notation:
F_G = z*inner(u, grad(rho))*nu*dx
F_G += z*(inner(rho*grad(u)*u + grad(p),v) - theta*inner(sigma, grad(v)) + \
nnu*inner(grad(u),grad(v)) - rho*dot(f,v))*dx
F_G += z*(inner(dot(u, grad(sigma)) + \
theta*(2*rho*mumu*epsilon(u) + grad(u)*sigma + sigma*grad(u).T), y))*dx
Building aerodynamics
Master thesis by Linde van Beers supervised by Johan Jansson.
Reference left, Digital Math RFS simulatiom right. Captures drag force \ to within 10%, captures features.
Multiphase - marine - flooding
Formula 1 - Perrinn benchmark
(joint work with Torbjörn Larsson former Ferrari/Red Bull Head of CFD)
\
CD and CL within 4%
IEA-OES benchmark project on wave energy
Adaptive error control for fixed aoa=21.5 (fine surface mesh)
CD, CL and CM within 10% of exp, mesh-independent
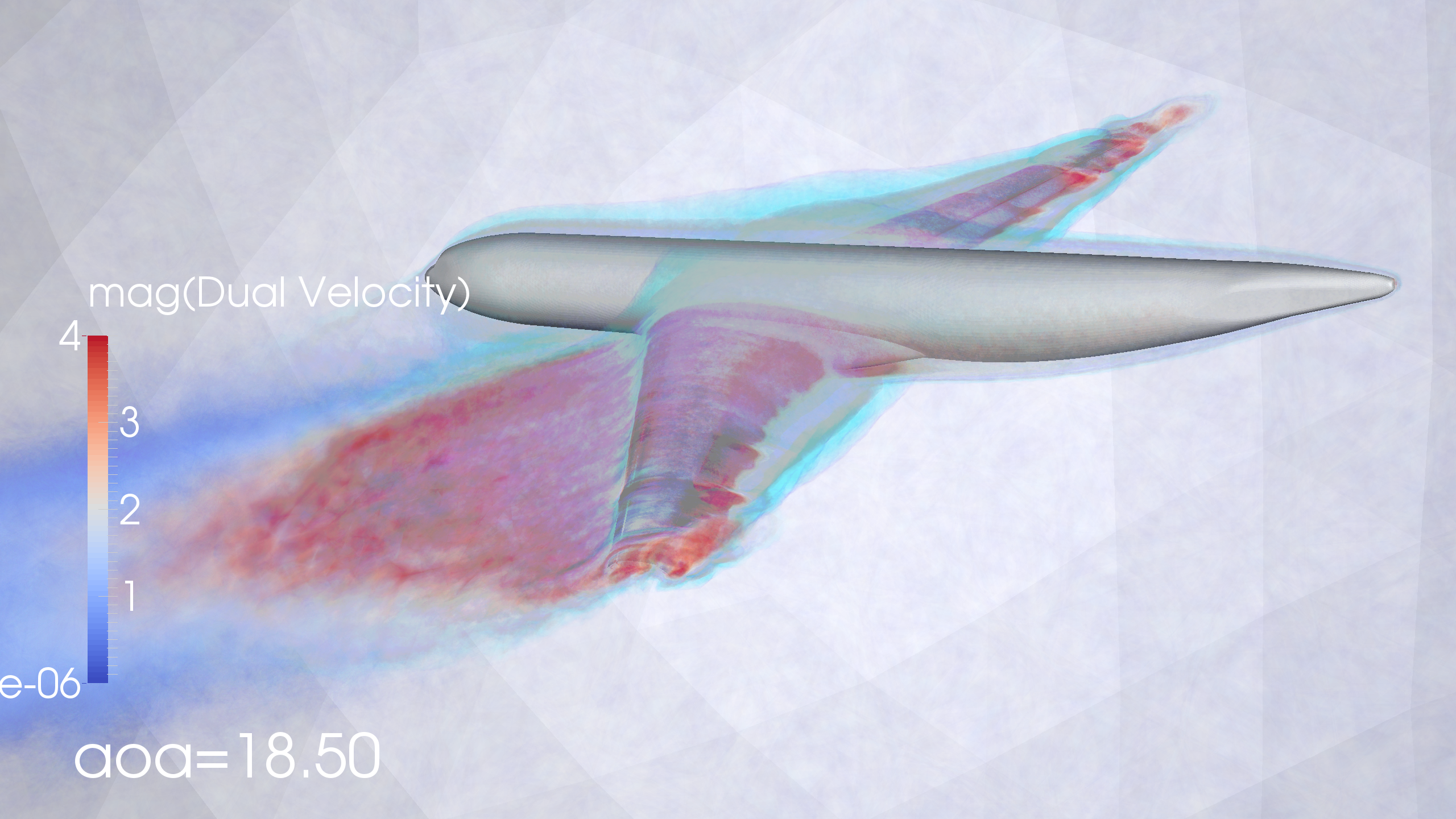
Snapshot of adjoint solution (green) for aoa=21.5
Showing sensitivity in nacelle and wing-root region
Snapshot of adjoint solution (green) for aoa=21.5
Showing sensitivity in nacelle and wing-root region
Cylinder Re sweep from Re=4e3 to Re=Infinite (e.g. 1e7+)
Adaptive Euler Unified Compressible Mach=0.2
Adaptive Euler Unified Compressible Mach=0.7
Adaptive Euler Unified Compressible Mach=2.0
Adaptive Euler Unified Compressible
Glider Optimal Sustainable Mobility
Project Glider develops a world-unique and efficient mobility solution based on gliding for the transport of people and goods. With gliding, neither energy storage (petrol, battery, etc.) nor engine is required on the craft, which brings enormous gains in weight, cost, complexity and durability. Gliding has been used militarily (largely during WWII) and today is mostly used for recreation. We see that gliding has great potential for large-scale sustainable movement of goods and people, as a sustainable mobility system for society.
Aviation today accounts for 2% of global carbon dioxide emissions, and the share is expected to increase to 15-27% by 2050. We are already a leader in electric flight research through our role in the ELISE project. Gliders mean even greater opportunities for sustainable mobility in that the problem of energy storage on the craft is eliminated.
Glider Optimal Sustainable Mobility
The technical idea is that the gliders are launched by e.g. an electric car or truck, or by an electric induction-based “launcher” similar to the established railgun technology used e.g. to launch aircraft from carriers. The glider aircraft can then glide 100km-200km, and can then be relaunched, or be provided with energy by induction at “energy stations”, eliminating the need for landing and relaunch.
A design variant can be that the glider aircraft have solar panels and a simple electric propulsion. With the efficient aerodynamics provided by our Adaptive Euler simulation-based design, and potentially by leveraging Ground Effect - giving appx. 2x higher efficiency, it appears possible to achieve “infinite range” with a simple solar-based solution.